
How to Fly a Racing Drone Safely
News flash: FPV (first-person view) drones are not the same as general drones. If someone rushes into flying an FPV drone without the right preparation, there’s a good chance they’ll make a costly error…
So do you learn to fly a racing drone?
Here’s the challenge: racing drones are not just faster, but they’re fundamentally different to control than a standard drone. Rather than commanding the angle of the drone with the sticks, you command the angular rates (the rate of change of the angles). In this case, if you get turned upside down and lose your sense of direction, it can be very difficult to reorient yourself.
A great illustration of this is Liftoff, an FPV drone racing game. The game will teach you the basics of controlling FPV racing drones, and allow you to practice in a wide variety of environments.
However, the transition from a simulator to a physical racing drone will add difficulty. Not only will the dynamics of the drone change, but the anxiety and fear of crashing the drone often makes the transition difficult. The solution? Develop a geofence around the drone.

Why are racing drones so difficult to fly?
The rapid motion and strict weight limitations of racing drones make it difficult to orient and localize yourself as the pilot. Moreover, the lack of a quick recovery mechanism makes an already difficult task more daunting.
It is not just difficult for humans. We are just now reaching the point where an autonomous drone can compete with humans in controlled conditions (a great video on the matter can be found here). However, in uncontrolled environments, human pilots vastly outperform autonomous drones. Why? Because of the complexity and restrictions in place, all of which introduce major difficulty, even for the most sophisticated autonomous systems.
What is Geofencing?
Geofencing refers to the creation of an invisible, virtual fence that allows drone manufacturers to help protect restricted airspaces (such as those around airports). By using the GPS receiver in a drone, the drone can calculate whether or not it is safe to fly, and respond accordingly.
Some drones have no geofencing ability; others offer geofencing that can be disabled; and some have geofencing that cannot be turned off. Each of these scenarios has its own pros and cons: if a particular manufacturer’s geofencing system prevents drones from flying in certain areas, then it may not always be wise to do so. However, there are instances where operators might require clearance to fly in a restricted zone but due to geofencing.
How do you create a geofence for a racing drone?
Here at 3Laws, we found our own unique approach.
Existing geofencing solutions were highly conservative, restricting the speed of the drone in a large region around the boundary. With limited space to fly, existing approaches would not allow a pilot to push the limits of their drone.
So our geofence was generated as a cuboid in the sky with the bottom above the ground, so that the drone cannot fall out of the sky and onto the ground.
In this paper, we show how a geofence can be enforced for a racing drone that allows the user to freely fly the drone at high speeds within the geofence.
Our approach worked. In the figure below, we show two examples of the pilot attempting to leave the geofence: one by flying straight at the wall at >100 km/hr, and once by killing the thrust at a height of 70m.
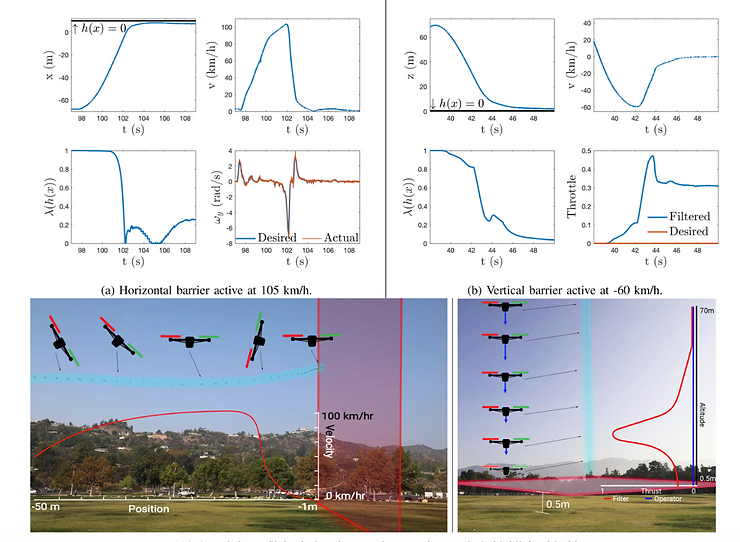
In both of these cases, the drone was able to safely stop before leaving the geofence. However, without this algorithm in place, a pilot would be unable to safely learn and push the limits of their flying skills without fear of crashing or flying into regulated airspace.
Try it for yourself!
To see this geofencing principle in action, you can implement the algorithms from the paper yourself. This can be done with a small microcontroller that intercepts the signal from the radio, and modifies it if necessary based on the safety constraint.
In our implementation, we used a FrSky Tanaris X9D connected through a Teensy 4.0 to the flight controller. The Teensy 4.0 took in the SBUS signals from the radio, modified them with the geofencing algorithm, and sent the resulting signals through to the flight controller with SBUS at a frequency of 100Hz.
Be careful in your choice and placement of the microcontroller, as the vibrations in racing drones can cause issues with the reliability of the devices. It would be wise to have a failsafe mechanism in place to directly communicate with the flight controller if the intercepting microcontroller fails, such as a stabilizing and landing controller when no signal from the radio is received.